WP linear climb dive#5226
Conversation
|
Tested (flying wing, dev branch + #5112 + #5226)
The mission was designed to be easily and audibly observable with visually obvious and achievable altitude changes (WPs at 20m, 35m and 50m with c. 120m legs). Excellent. |
|
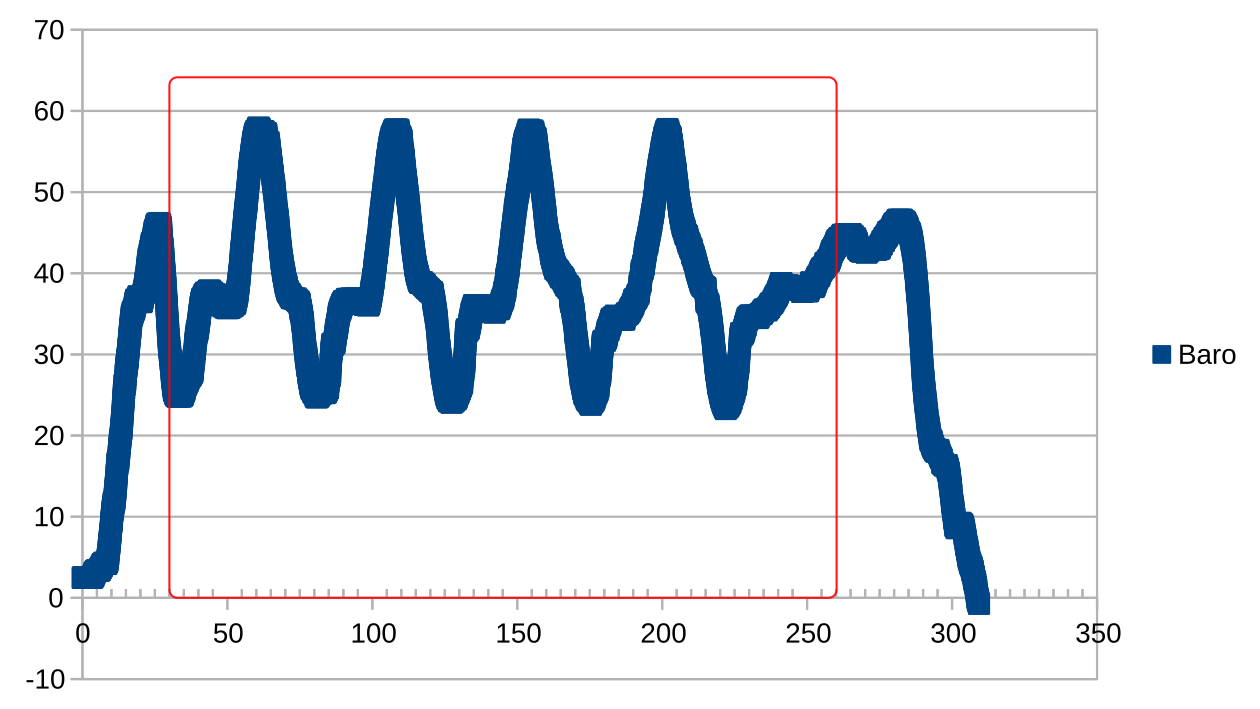
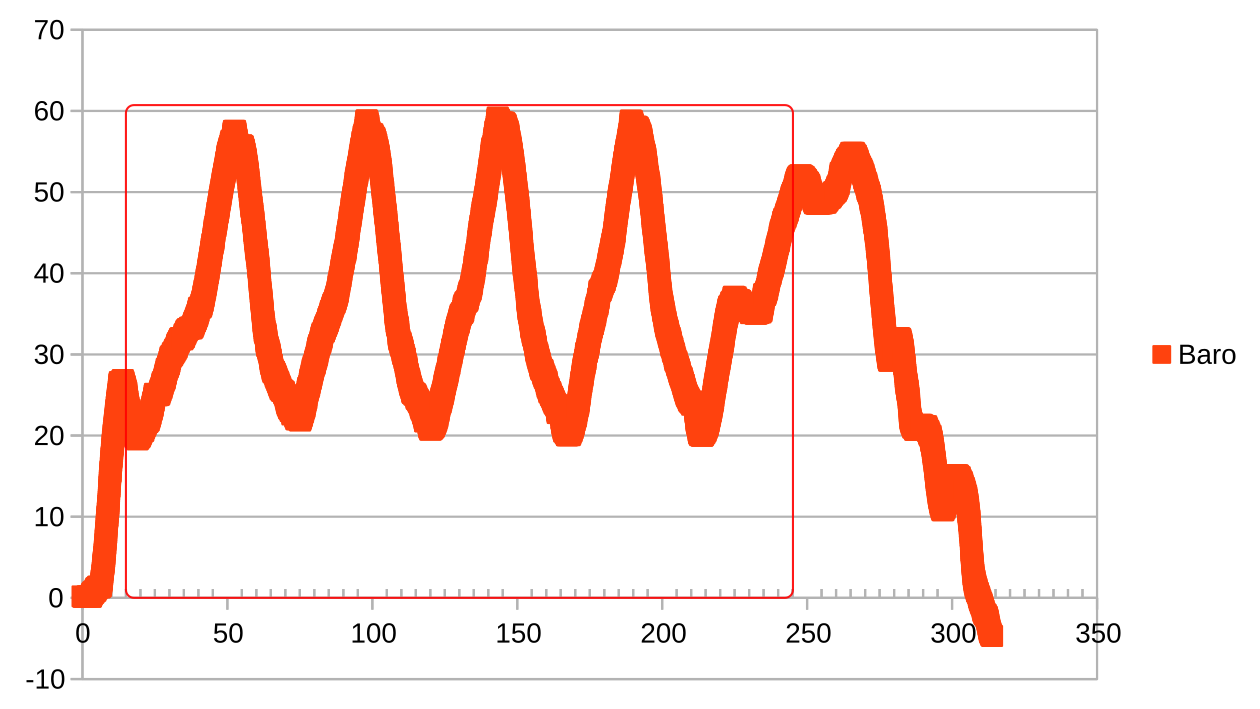
Here's some graphs of time v baro. The area in the thin red box is the time under WP navigation. You can probably work out which flight matches which plot.
On reflection, it appears that there is a possibly a difference in behaviour for the last part (which was RTH), the elevation at the last WP being 35m, as is the RTH altitude. Logs, mission file and diff available if useful. |
 digitalentity
left a comment
digitalentity
left a comment
There was a problem hiding this comment.
Not very clean, but we can clean it up later if necessary.
|
Well done @hali9 ! |
|
Just tested last version from development branch, to try the linear WP missions, but didn't go so well.... Very unstable altitude hold in WP / RTH / 3CRS mode. Some slow oscillation, very poor alt hold, while it flew perfectly stable using the same settings before. Still something very wrong in the software..... Repeated the flight with current official 2.3.0 release, with the exact same mission, and the exact same diff. Now it flew stable again (ok, no linear WP missions, but otherwise fine again). Still hoping for the linear WP missions, but it isn't working yet.... |
http://seyrsnys.myzen.co.uk/wp-linear/wp-linear-files.tar.gz XMLmission, cli diff, BBL (one without, two with).
No, I don't think it has been merged yet. |
|
@stronnag And I think I found the reason. When So generaly alt is set up to value between rthInitialAltitude and rthFinalAltitude, but where do these values come from? In Your case nav_rth_alt_mode = AT_LEAST, so rthInitialAltitude = MAX(35m, current alt) and rthFinalAltitude = rthInitialAltitude. |
|
It was just an observation; I'm content. In hindsight, it was a poorly defined test to coincidentally have the final WP altitude the same as the RTH AT_LEAST altitude. |
|
Yes, but if the last WP is 35m, the plane should fly at this altitude when doing WPRTH. Instead of rising or falling. |
|
Tested, works great ! |
|
Tried today in very windy conditions with my old (T)rusty Tricopter, using the branch from OlivierC with the OSD-HUD (oc_hud_waypoints2) Seems to work just fine on the Tricopter, and very nice to see the waypoints in the HUD. Now need to try again with the MiniTalon, once weather allows. BTW, @OlivierC-FR Hope this makes it into the development branch, and ultimately, iNav master. Thanks a lot ! |
To keep it simple I made all hud-things part of the crosshair, so it's not possible to hide only the WP, but what you can do on the 2nd screen is disable the crosshair, this will also turn off the WPs (but also the 3D marker for the home point). |
|
Finally, the weather allowed for a test flight with the Mini Talon. OSD HUD elements worked perfect. Thanks Olivier ! However, WP lineair climb / dive way points still doesn't work as intended. Was very windy / bumpy today, so cannot say 100% sure, but still, altitude hold in 3CRS feels very different from standard firmware. It simply is not very stable in 3CRS / WP / RTH. Perhaps it is better than what I tried 3 weeks ago, but difficult to say in this wind. However, on the way to the 3rd WP, which is about 3 km out (the 1st two were only a few hundred meters away from home), after completing about 650 meters (from previous WP), it made a sudden dive. It was initially climbing as expected towards the 500 meter alt target of WP3. It had reached an alt of 220 meters, before it started to dive. On the first try, I interrupted before it went too low and went into RTH. After another 1200 meters flight, (Still before reaching WP3) the same thing happened, and it started to dive again. By that time, it was over 2 km away from home, and going too low, behind some obstacles, so I couldn't allow it to go any lower, without completely loosing video, so I had to interrupt. I've attached the blackbox log. Hopefully it helps to explain what went wrong. If I run the same mission file in the 'official' 2.3.0 iNav, it executes it perfectly, and also is a lot more solid in alt-hold. Perhaps there is some kind of overflow in the calculations, that makes it behave like this, and makes it not show up the issue, if only flying close to home ? A distance of 650 meters (65000 cm) from WP2, could be like some 64K limit overflow (but could just be coincedence... I don't know enough of programming to find out.... ) Or has the 220 meter (256 GPS) altitude something to do with it ? All three times, it dove at pretty much when reaching 220 meters alt AGL (we are at approx 35m ASL here, so that would be 255 GPS alt). The testflight with the tricopter, that went ok last week, never went that far away from home. Thanks a lot for all your efforts ! Much appreciated. |
|
In math.c in scaleRange function
Anyway #5287 should be fix ths. |
|
Thanks a lot ! |
|
Hi @hali9 Just completed a small WP test mission, and with those last changes, it works perfectly ! THANK YOU ! @OlivierC-FR Anyway, I call this a succes !!!!.... I'll prepare some more test missions, with 'impossible' alt changes, 180 deg course reversal, etc, just to confirm it doesn't do anything strange, before sending it out again on long WP missions out of radio / video range. Thanks a lot again ! and a Merry Christmas ! |
|
Just to confirm: No strange behaviour. It flew it as best as it could, without any problems. I'm confident enough I can sent it out on far missions, even out of radio range, without worries. Thanks again for a great addition ! |
#5219
Not tested yet.