Mechanical Engineering students of MIE444 at the University of Toronto
Andres Cervera Rozo, Christopher Tong, Liam Toner, Nathalie Cristofaro
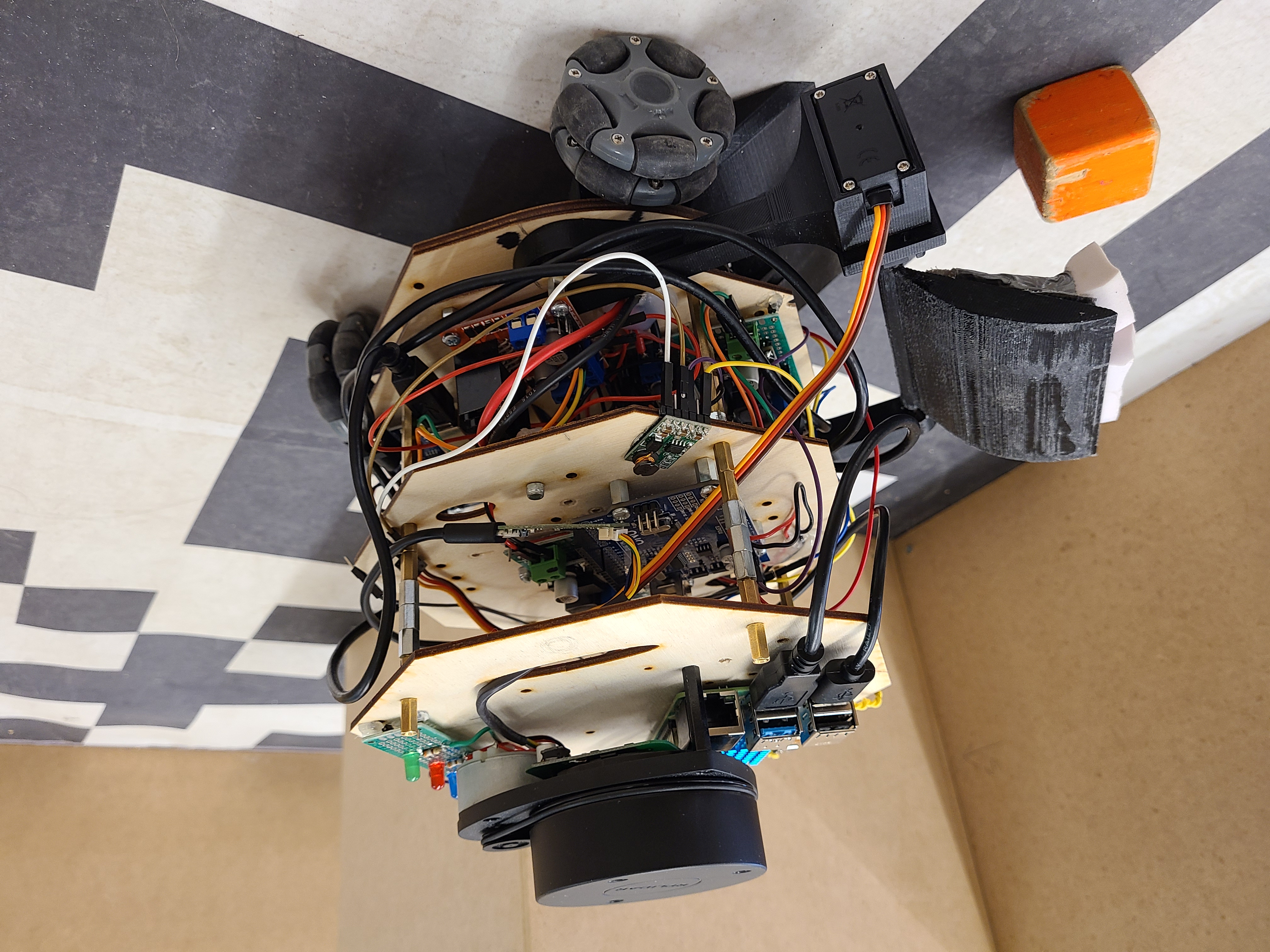
Course project to autonomously navigate through a maze and retrieve a wooden block
Enter Summary of project, contest, 3 milestones, and key words of our design
- 360 degree Lidar
- 3 Omni wheels for holonomic movement
- Hector SLAM for mapping area
- AMCL and move_base for localization and navigation to various waypoints
- Gazebo simulation of maze for parameter tuning
- Servo motor to retreive a block based on a Time of Flight sensor
- 3 DC Motors with encoders for straight motion tuning
- LED feedback
- Laser-cut plywood chassis
- 2 Arduino UNOs for rapid microcontroller response
- Raspberry Pi for communication to remote ROS Master
- 3D-printed sensor mounts and block retrieval mechanism

Please view this video to view the successful completion of the first milestone Trial Video