This repository contains the code related to the "Modeling and control of robotic manipulators" course. This considers the simulation through the PyBullet environment of 2 robots:
-
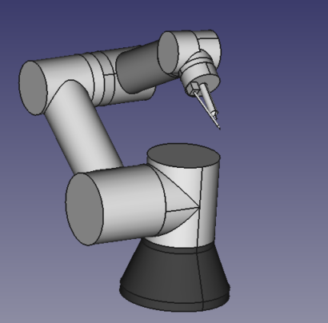
6 DoF Elbow robot with spherical wrist
-
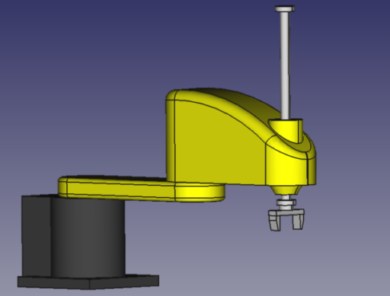
4 DoF Scara robot
- Unified Robot Description Format (URDF)
- Visual (dae) and collision meshes (stl)
- Mathematical models necesary for the drivers
- Forward kinematics solver
- Inverse kinematics solver
- Third order trajectory generator
- Simulation scripts
- CAD files in FreeCad format


| Name | Version |
|---|---|
| Python | 3.10 |
| PyBullet | 3.2.5 |
| Numpy | 1.23 |
- 6 DoF Elbow robot Elbow_trajectory without considering the collision meshes
- 6 DoF Elbow robot Elbow_collision considering the collision meshes
- 4 DoF Scara robot Scara_P&P during a pick & place application